1.基本工作原理
在待测流体中施放示踪粒子,利用厚约1mm的激光片光照亮待测平面,跟随流体运动的示踪微粒被激光照射后散射光斑,使用相机以Dt的间隔(不能太长或太短)拍摄散射光斑形成两张粒子图像。
将两张粒子图像划分为若干矩形区域(判读窗口)(不能太大或太小),根据两图片中对应判读窗口内粒子图像可得到示踪粒子在Dt间隔内的位移Dx,进而得到各窗口对应流体微团的流速矢量。
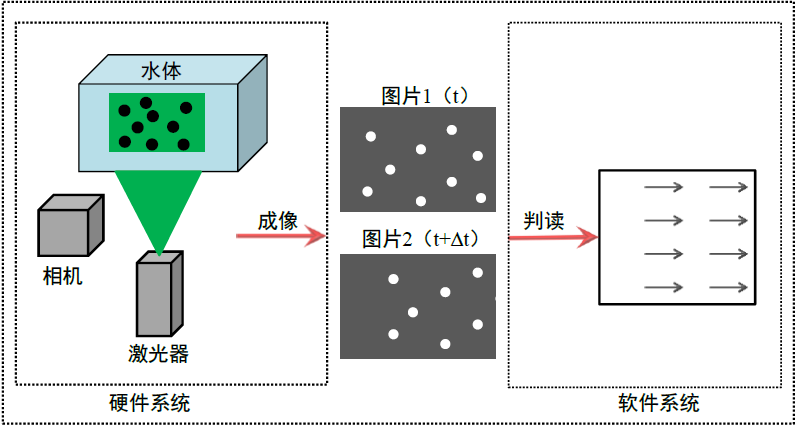
PIV计算原理示意图
2.系统组成
(1)示踪粒子
根据PIV工作原理,开展流动测量使用的示踪粒子需要同时具备良好的跟随性和散光性。为避免示踪颗粒对流场产生显著扰动,颗粒粒径应足够小,气体示踪颗粒粒径一般0.5-5mm,液体示踪颗粒密度一般5-50mm;同时,颗粒外观应为具有各向同性特征的球形。沿流动方向,颗粒需要具有良好的频率响应以准确反映流体速度的时空变化。良好的颗粒频响能力要求颗粒密度与流体密度接近,或颗粒粒径足够小。散光性是指示踪颗粒散射入射光线的能力,散光性越强,散射光线的强度越大,被相机记录的粒子图像质量越好。根据米氏散射理论,颗粒散光性主要取决于粒径和相对于流体的折射率,粒径及相对折射率越大,散光性越好。
(2)PIV相机
PIV相机所使用的图像传感器有CCD和CMOS之分,二者成像质量无明显差异,由规则排列的像元矩阵组成,每个像元为独立感光单元,物理尺寸一般2-12mm,输出结果对应图像中的一个像素。PIV系统使用的相机不同于普通消费级或工业相机。根据工作模式的不同,PIV系统使用的相机有低速跨帧相机、高速相机和高速跨帧相机之分。
(3)PIV激光器
激光是最为理想的PIV光源,根据工作模式的不同,PIV系统使用的激光器有连续激光器和脉冲激光器之分,激光波长通常为532nm或527nm的绿光。连续激光器体积小巧,采用风冷技术,输出功率连续可调,但最大功率通常£20W;激光器与相机独立工作,粒子图像曝光时间及成像间隔由相机控制,需要较长曝光时间才能获得清晰粒子图像。脉冲激光器体积庞大,采用水冷技术,输出功率连续可调,单脉冲能量高达500mJ;激光器与相机同步工作,需要配备信号同步器,粒子图像曝光时间等于脉冲宽度,粒子图像质量高。
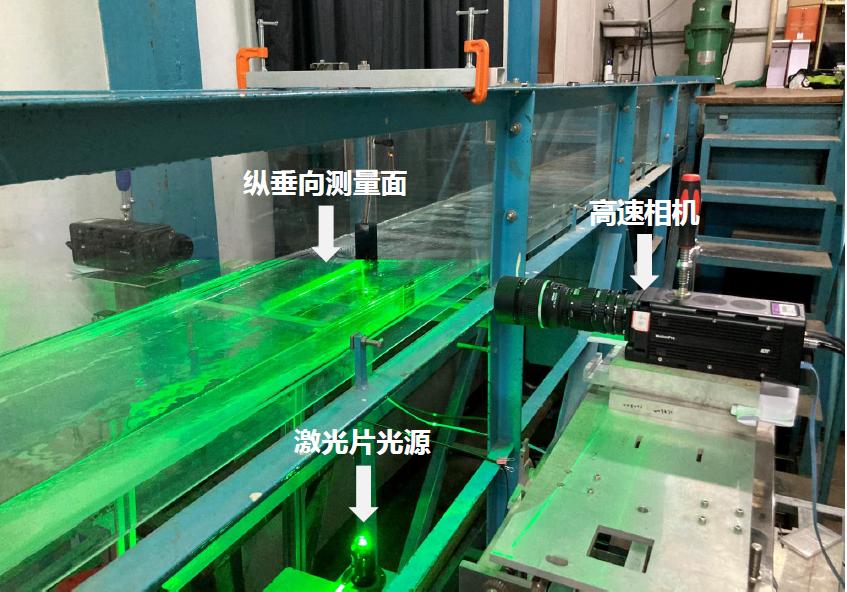
PIV系统主要空间布置
3.计算方法
将两张粒子图像划分为若干矩形区域(判读窗口),再计算两图片中对应判读窗口内粒子图像的互相关函数,根据互相关函数的峰值点位置,即可得到示踪粒子在Dt间隔内的位移,进而得到流速矢量。判读窗口尺寸(边长)通常可取32像素,但要根据粒子图像密度、流体速度及测量空间分辨率等因素调整;最小窗口尺寸的设置原则是,两帧图像对应的窗口对之间共有的粒子数不少于2-3颗;窗口尺寸与片光厚度决定了各测点代表的流体微团的体积,代表了PIV测量结果的空间分辨率,因此,最大窗口尺寸一般应小于1mm。

PIV计算步骤示意图
4.主要优势
Ø 测速范围广,低速到超高速;
Ø 测量频率高,可达10kHz;
Ø 空间分辨率,可达0.1mm;
Ø 测量精度高(~1.0%);
Ø 可测量多点瞬态2维流速;
Ø 非接触式测量。

PIV流场计算结果示例
